DOI: https://doi.org/10.48084/etasr.12744
تاريخ النشر: 2025-10-06
استراتيجية توجيه فعالة من حيث الطاقة مدفوعة بالخوارزمية الجينية لتحسين الأداء في شبكات السيارات المتنقلة
مرخص بموجب ترخيص CC-BY 4.0 | حقوق الطبع والنشر (c) من قبل المؤلفين | DOI: https://doi.org/10.48084/etasr. 12744
الملخص
تعتبر شبكات VANETs الآن ضرورية للنقل الذكي لأنها تتيح للمركبات والبنية التحتية للطرق إرسال واستقبال الرسائل على الفور. ومع ذلك، تواجه طرق WSN تحديات بسبب حركة المركبات والطاقة المحدودة للعقد، بالإضافة إلى عدد المركبات. تقدم هذه الدراسة تقنية توجيه جديدة تعتمد على الخوارزمية الجينية للتحكم في تسليم الحزم وتقليل استهلاك الطاقة الكلي في شبكات VANETs. تم نمذجة شبكة VANET تحتوي على 500 مركبة في منطقة
المقدمة
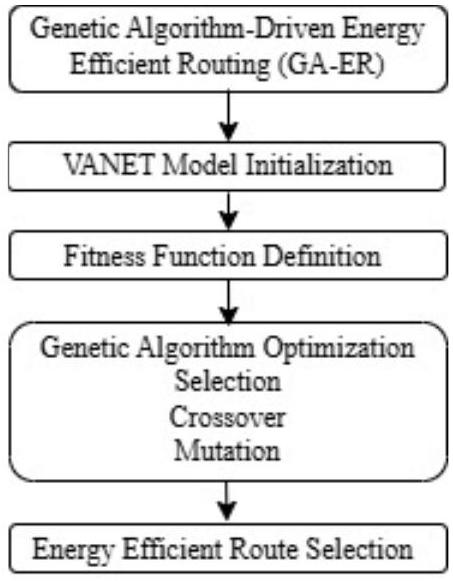
وانخفاض الموثوقية، وزيادة فقدان الحزم [8]. بسبب هذه القيود، أصبحت التقنيات المستوحاة من الطبيعة والتقنيات البيولوجية أكثر شعبية مؤخرًا. تظهر الخوارزميات الجينية (GAs) إمكانيات، حيث إنها مرنة، وفعالة في البحث، ويمكنها حل مشاكل التحسين العالمية في الظروف المتغيرة [9]. تستخدم الخوارزميات الجينية مجموعة من المسارات، وتقوم بتحسينها باستمرار باستخدام الاختيار، والتزاوج، والطفرات بناءً على دالة لياقة محددة. يمكن إعداد الخوارزميات الجينية في توجيه شبكات VANET لتحسين المسارات، والتحكم في استهلاك الطاقة للأجهزة، والحفاظ على تحميل الشبكة متوازنًا، ومنع أي عقدة واحدة من نفاد الطاقة بسرعة كبيرة.
لديها فقط 1 جول من الطاقة للاستخدام، ولا يمكن مشاركة البيانات إلا ضمن نطاق 150 مترًا، كما هو موجود في الشبكات المركبات الحقيقية. المساهمات الرئيسية لهذا البحث هي كما يلي:
- بروتوكول توجيه جديد يعتمد على الخوارزمية الجينية يختار ديناميكيًا المسارات الفعالة من حيث الطاقة من خلال تقييم تكلفة النقل، والطاقة المتبقية، وقيود الاتصال.
- إطار محاكاة قابل للتوسع نمذجة ظروف VANET الحقيقية مع تتبع تفصيلي للطاقة وديناميات العقد.
- تحليل أداء مقارن مع البروتوكولات التقليدية (AODV وDSR) في المقاييس الأساسية: نسبة تسليم الحزم (PDR)، وتأخير من النهاية إلى النهاية، وإجمالي الطاقة المستهلكة.
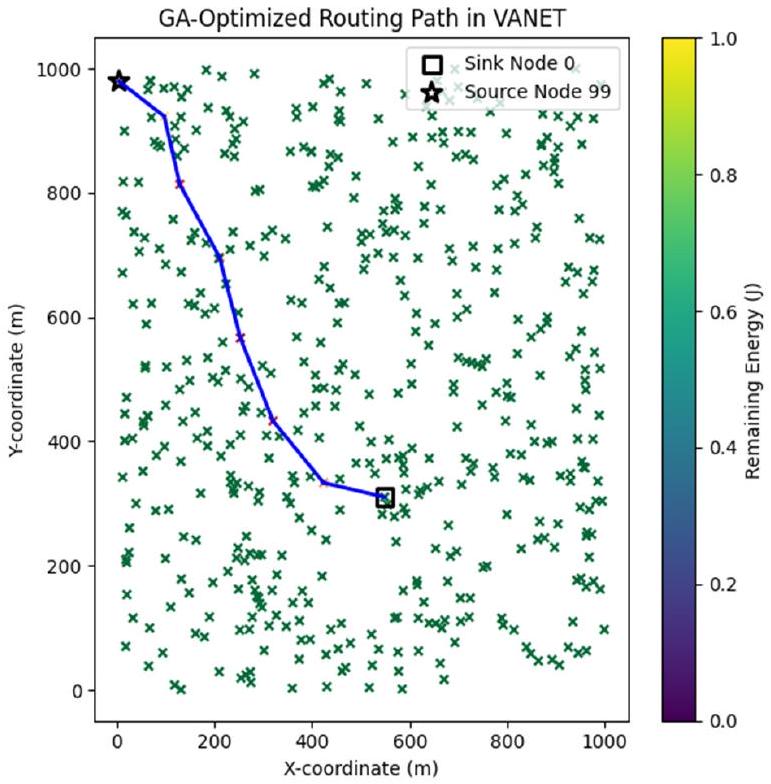
- تصور شامل لتبدد طاقة العقد ومسارات التوجيه لتسليط الضوء على فعالية الخوارزمية الجينية في تحقيق توازن تحميل الشبكة.
II. الخوارزمية المقترحة
أ. نظرة عامة على النظام
ب. نموذج الشبكة والافتراضات
ج. نموذج استهلاك الطاقة
د. تصميم الخوارزمية الجينية
1) تمثيل الكروموسوم
2) دالة اللياقة
3) الاختيار
4) تقاطع
5) طفرة
III. إعداد المحاكاة والتقييم
أ. بيئة المحاكاة
| المعلمات | قيمة | |
| 1 | عدد العقد | ٥٠٠ |
| ٢ | منطقة الشبكة |
|
| ٣ | الطاقة الأولية للعقد | 1 ج |
| ٤ | نطاق الاتصال | 150 م |
| ٥ | حجم حزمة البيانات | 10 كيلوبايت (81920 بت) |
| ٦ | عقدة الغمر | العقدة 0 |
| ٧ | نموذج التنقل | ثابت (أساسي)، ديناميكي في العمل المستقبلي |
| ٨ | عدد أجيال الخوارزمية الجينية | 50 |
| 9 | حجم السكان | 30 |
| 10 | احتمالية التداخل | 0.7 |
| 11 | احتمالية الطفرة | 0.3 |
ب. مقاييس التقييم
- نسبة تسليم الحزم (PDR): نسبة الحزم التي تم تسليمها بنجاح إلى إجمالي الحزم المرسلة.
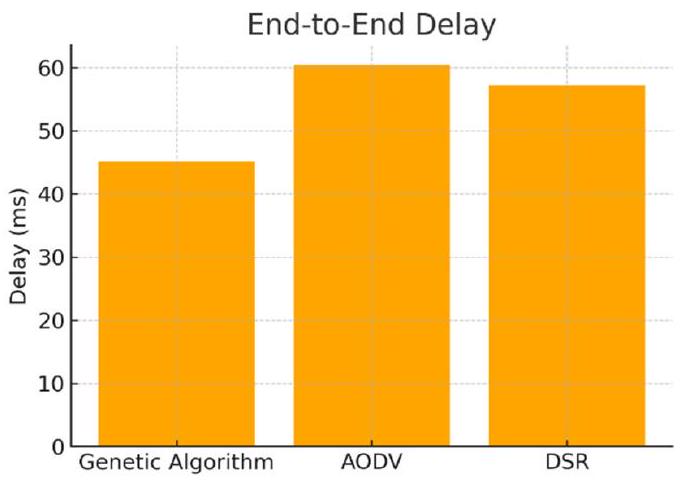
- تأخير من طرف إلى طرف: متوسط الوقت المستغرق لانتقال حزمة بيانات من المصدر إلى المصب.
- إجمالي استهلاك الطاقة: الطاقة التراكمية المستهلكة من قبل جميع العقد أثناء نقل البيانات.
- عمر الشبكة (الملاحظ): عدد الإرساليات الناجحة قبل أن تستنفد أول عقدة الطاقة.
- عدد القفزات في المسار: عدد القفزات في مسار التوجيه من المصدر إلى المصب.
ج. مقارنة الأداء
| بروتوكول التوجيه | PDR (%) | التأخير (مللي ثانية) | الطاقة (جول) |
| الخوارزمية الجينية | 92.5 | 45.2 | 0.66 |
| AODV | 86.7 | 60.5 | 1.20 |
| DSR | 89.2 | 57.3 | 1.10 |
رابعاً. الاستنتاج
REFERENCES
[2] D. Desai, H. El-Ocla, and S. Purohit, “Data Dissemination in VANETs Using Particle Swarm Optimization,” Sensors, vol. 23, no. 4, Feb. 2023, Art. no. 2124, https://doi.org/10.3390/s23042124.
[3] P. Sra and S. Chand, “QoS in Mobile Ad-Hoc Networks,” Wireless Personal Communications, vol. 105, no. 4, pp. 1599-1616, Apr. 2019, https://doi.org/10.1007/s11277-019-06162-y.
[4] S. Hao, H. Zhang, and M. Song, “A Stable and Energy-Efficient Routing Algorithm Based on Learning Automata Theory for MANET,” Journal of Communications and Information Networks, vol. 3, no. 2, pp. 43-57, Jun. 2018, https://doi.org/10.1007/s41650-018-0012-7.
[5] S. W. Lee, K. S. Heo, M. A. Kim, D. K. Kim, and H. Choi, “Multiple-Junction-Based Traffic-Aware Routing Protocol Using ACO Algorithm in Urban Vehicular Networks,” Sensors, vol. 24, no. 9, May 2024, Art. no. 2913, https://doi.org/10.3390/s24092913.
[6] R. Ramamoorthy, “An Enhanced Location-Aided Ant Colony Routing for Secure Communication in Vehicular Ad Hoc Networks,” HumanCentric Intelligent Systems, vol. 4, no. 1, pp. 25-52, Jan. 2024, https://doi.org/10.1007/s44230-023-00059-7.
[7] P. Upadhyay et al., “An improved deep reinforcement learning routing technique for collision-free VANET,” Scientific Reports, vol. 13, no. 1, Dec. 2023, Art. no. 21796, https://doi.org/10.1038/s41598-023-48956-y.
[8] A. Amalia, Y. Pramitarini, R. H. Y. Perdana, K. Shim, and B. An, “A Deep-Learning-Based Secure Routing Protocol to Avoid Blackhole Attacks in VANETs,” Sensors, vol. 23, no. 19, Oct. 2023, Art. no. 8224, https://doi.org/10.3390/s23198224.
[9] W. Luo, “A quantum genetic algorithm based QoS routing protocol for wireless sensor networks,” in 2010 IEEE International Conference on Software Engineering and Service Sciences, Beijing, China, Jul. 2010, pp. 37-40, https://doi.org/10.1109/ICSESS.2010.5552333.
[10] S. Girijalakshmi, K. Sivakumar, and C. Chandrasekar, “DSDV addendum through genetic algorithm in VANET,” in Proceedings of the National Conference on Innovation in Computing and Communication Technology, 2016, pp. 19-23.
[11] T. Sanislav, S. Zeadally, G. D. Mois, and S. C. Folea, “Wireless energy harvesting: Empirical results and practical considerations for Internet of Things,” Journal of Network and Computer Applications, vol. 121, pp. 149-158, Nov. 2018, https://doi.org/10.1016/j.jnca.2018.08.002.
[12] A. C. Pise and D. K. J. Karande, “An Exploratory Study of ClusterBased Routing Protocol in VANET: A Review,” International Journal of Advanced Research in Engineering and Technology, vol. 12, no. 10, pp. 17-30.
[13] A. C. Pise and K. J. Karande, “K-Mean Energy Efficient Optimal Cluster Based Routing Protocol in Vehicular Ad-Hoc Networks,” in Modern Approaches in Machine Learning and Cognitive Science: A Walkthrough, vol. 1117, V. K. Gunjan, J. M. Zurada, and N. Singh, Eds. Springer International Publishing, 2024, pp. 305-313.
[14] P. Pal, S. Tripathi, and C. Kumar, “Bandwidth estimation in high mobility scenarios of IEEE 802.11 infrastructure-less mobile ad hoc networks,” International Journal of Communication Systems, vol. 32, no. 15, 2019, Art. no. e4080, https://doi.org/10.1002/dac. 4080.
[15] A. C. Pise and K. J. Karande, “Cluster Head Selection Based on ACO in Vehicular Ad-Hoc Networks:,” in Advances in Computer and Electrical Engineering, P. N. Mahalle, D. G. Takale, S. Sakhare, and G. B. Regulwar, Eds. IGI Global, 2024, pp. 269-290.
[16] Z. Sh. Alzaidi, A. A. Yassin, Z. A. Abduljabbar, and V. O. Nyangaresi, “A Fog Computing and Blockchain-based Anonymous Authentication Scheme to Enhance Security in VANET Environments,” Engineering, Technology & Applied Science Research, vol. 15, no. 1, pp. 1914319153, Feb. 2025, https://doi.org/10.48084/etasr. 8663.
[17] D. G. Takale, S. D. Gunjal, V. N. Khan, A. Raj, and S. N. Gujar, “Road Accident Prediction Model Using Data Mining Techniques,” NeuroQuantology, vol. 20, no. 16, pp. 2904-2101, 2022.
DOI: https://doi.org/10.48084/etasr.12744
Publication Date: 2025-10-06
A Genetic Algorithm-Driven Energy-Efficient Routing Strategy for Optimizing Performance in VANETs
Licensed under a CC-BY 4.0 license | Copyright (c) by the authors | DOI: https://doi.org/10.48084/etasr. 12744
Abstract
VANETs are now essential for smart transportation because they make it possible for vehicles and road infrastructure to send and receive messages instantly. However, WSN routes are challenged by the movement and the limited energy of the nodes, along with the number of vehicles. This study presents a new GA-based routing technique to control packet delivery and reduce total energy consumption in VANETs. A VANET with 500 vehicles was modeled in a
I. INTRODUCTION
lower reliability, and higher packet losses [8]. Due to these limitations, heuristic and bio-inspired techniques have become more popular lately. Genetic Algorithms (GAs) demonstrate potential, as they are flexible, efficient in searching, and can solve global optimization problems in changing conditions [9]. GAs use a population of routes, continuously refining them using selection, crossover, and mutation based on a set fitness function. GAs can be set up in VANET routing to improve routes, control the energy usage of devices, maintain a balanced network load, and prevent any single node from running out of energy too fast.
node has only 1 J of energy to use, and the data can only be shared within a 150 m span, as found in real-life vehicular networks. The key contributions of this research are as follows:
- A novel GA-based routing protocol that dynamically selects energy-efficient paths by evaluating transmission cost, residual energy, and connectivity constraints.
- A scalable simulation framework modeling real-world VANET conditions with detailed energy tracking and node dynamics.
- Comparative performance analysis with traditional protocols (AODV and DSR) in core metrics: Packet Delivery Ratio (PDR), end-to-end delay, and total energy consumed.
- A comprehensive visualization of node energy dissipation and routing paths to highlight the GA’s effectiveness in balancing network load.
II. PROPOSED ALGORITHM
A. System Overview
B. Network Model and Assumptions
C. Energy Consumption Model
D. Genetic Algorithm Design
1) Chromosome Representation
2) Fitness Function
3) Selection
4) Crossover
5) Mutation
III. SIMULATION SETUP AND EVALUATION
A. Simulation Environment
| Parameters | Value | |
| 1 | Number of nodes | 500 |
| 2 | Network area |
|
| 3 | Initial energy of nodes | 1 J |
| 4 | Communication range | 150 m |
| 5 | Data packet size | 10 KB (81920 bits) |
| 6 | Sink node | Node 0 |
| 7 | Mobility model | Static (baseline), dynamic in future work |
| 8 | Number of GA generations | 50 |
| 9 | Population size | 30 |
| 10 | Crossover probability | 0.7 |
| 11 | Mutation probability | 0.3 |
B. Evaluation Metrics
- Packet Delivery Ratio (PDR): Ratio of successfully delivered packets to the total packets sent.
- End-to-End Delay: Average time taken for a data packet to traverse from source to sink.
- Total Energy Consumption: Cumulative energy expended by all nodes during data transmission.
- Network Lifetime (observed): Number of successful transmissions before the first node depletes energy.
- Path Hop Count: Number of hops in the routing path from the source to the sink.
C. Performance Comparison
| Routing Protocol | PDR (%) | Delay (ms) | Energy (J) |
| Genetic Algorithm | 92.5 | 45.2 | 0.66 |
| AODV | 86.7 | 60.5 | 1.20 |
| DSR | 89.2 | 57.3 | 1.10 |
IV. CONCLUSION
REFERENCES
[2] D. Desai, H. El-Ocla, and S. Purohit, “Data Dissemination in VANETs Using Particle Swarm Optimization,” Sensors, vol. 23, no. 4, Feb. 2023, Art. no. 2124, https://doi.org/10.3390/s23042124.
[3] P. Sra and S. Chand, “QoS in Mobile Ad-Hoc Networks,” Wireless Personal Communications, vol. 105, no. 4, pp. 1599-1616, Apr. 2019, https://doi.org/10.1007/s11277-019-06162-y.
[4] S. Hao, H. Zhang, and M. Song, “A Stable and Energy-Efficient Routing Algorithm Based on Learning Automata Theory for MANET,” Journal of Communications and Information Networks, vol. 3, no. 2, pp. 43-57, Jun. 2018, https://doi.org/10.1007/s41650-018-0012-7.
[5] S. W. Lee, K. S. Heo, M. A. Kim, D. K. Kim, and H. Choi, “Multiple-Junction-Based Traffic-Aware Routing Protocol Using ACO Algorithm in Urban Vehicular Networks,” Sensors, vol. 24, no. 9, May 2024, Art. no. 2913, https://doi.org/10.3390/s24092913.
[6] R. Ramamoorthy, “An Enhanced Location-Aided Ant Colony Routing for Secure Communication in Vehicular Ad Hoc Networks,” HumanCentric Intelligent Systems, vol. 4, no. 1, pp. 25-52, Jan. 2024, https://doi.org/10.1007/s44230-023-00059-7.
[7] P. Upadhyay et al., “An improved deep reinforcement learning routing technique for collision-free VANET,” Scientific Reports, vol. 13, no. 1, Dec. 2023, Art. no. 21796, https://doi.org/10.1038/s41598-023-48956-y.
[8] A. Amalia, Y. Pramitarini, R. H. Y. Perdana, K. Shim, and B. An, “A Deep-Learning-Based Secure Routing Protocol to Avoid Blackhole Attacks in VANETs,” Sensors, vol. 23, no. 19, Oct. 2023, Art. no. 8224, https://doi.org/10.3390/s23198224.
[9] W. Luo, “A quantum genetic algorithm based QoS routing protocol for wireless sensor networks,” in 2010 IEEE International Conference on Software Engineering and Service Sciences, Beijing, China, Jul. 2010, pp. 37-40, https://doi.org/10.1109/ICSESS.2010.5552333.
[10] S. Girijalakshmi, K. Sivakumar, and C. Chandrasekar, “DSDV addendum through genetic algorithm in VANET,” in Proceedings of the National Conference on Innovation in Computing and Communication Technology, 2016, pp. 19-23.
[11] T. Sanislav, S. Zeadally, G. D. Mois, and S. C. Folea, “Wireless energy harvesting: Empirical results and practical considerations for Internet of Things,” Journal of Network and Computer Applications, vol. 121, pp. 149-158, Nov. 2018, https://doi.org/10.1016/j.jnca.2018.08.002.
[12] A. C. Pise and D. K. J. Karande, “An Exploratory Study of ClusterBased Routing Protocol in VANET: A Review,” International Journal of Advanced Research in Engineering and Technology, vol. 12, no. 10, pp. 17-30.
[13] A. C. Pise and K. J. Karande, “K-Mean Energy Efficient Optimal Cluster Based Routing Protocol in Vehicular Ad-Hoc Networks,” in Modern Approaches in Machine Learning and Cognitive Science: A Walkthrough, vol. 1117, V. K. Gunjan, J. M. Zurada, and N. Singh, Eds. Springer International Publishing, 2024, pp. 305-313.
[14] P. Pal, S. Tripathi, and C. Kumar, “Bandwidth estimation in high mobility scenarios of IEEE 802.11 infrastructure-less mobile ad hoc networks,” International Journal of Communication Systems, vol. 32, no. 15, 2019, Art. no. e4080, https://doi.org/10.1002/dac. 4080.
[15] A. C. Pise and K. J. Karande, “Cluster Head Selection Based on ACO in Vehicular Ad-Hoc Networks:,” in Advances in Computer and Electrical Engineering, P. N. Mahalle, D. G. Takale, S. Sakhare, and G. B. Regulwar, Eds. IGI Global, 2024, pp. 269-290.
[16] Z. Sh. Alzaidi, A. A. Yassin, Z. A. Abduljabbar, and V. O. Nyangaresi, “A Fog Computing and Blockchain-based Anonymous Authentication Scheme to Enhance Security in VANET Environments,” Engineering, Technology & Applied Science Research, vol. 15, no. 1, pp. 1914319153, Feb. 2025, https://doi.org/10.48084/etasr. 8663.
[17] D. G. Takale, S. D. Gunjal, V. N. Khan, A. Raj, and S. N. Gujar, “Road Accident Prediction Model Using Data Mining Techniques,” NeuroQuantology, vol. 20, no. 16, pp. 2904-2101, 2022.