التصنيف: فيزياء المادة المكثفة (Condensed Matter Physics)
-
روبوتات ميلي خفيفة الوزن وخالية من الانجراف تعمل بالتحكم المغناطيسي عبر الجرافين المحفز بالليزر غير المتناظر Lightweight and drift-free magnetically actuated millirobots via asymmetric laser-induced graphene

يجب أن تتمتع الروبوتات الدقيقة بتكلفة منخفضة، وحركة فعالة، والقدرة على تتبع مسارات الأهداف بدقة إذا كانت ستستخدم على نطاق واسع. مع المواد الحالية وطرق التصنيع، لا يزال من الصعب تحقيق جميع هذه الميزات في روبوت دقيق واحد. نحن نطور سلسلة من الروبوتات الدقيقة الحلزونية المعتمدة على الجرافين من خلال إدخال تشويه نمط الضوء غير…
-
GPAW: حزمة بايثون مفتوحة لحسابات البنية الإلكترونية GPAW: An open Python package for electronic structure calculations
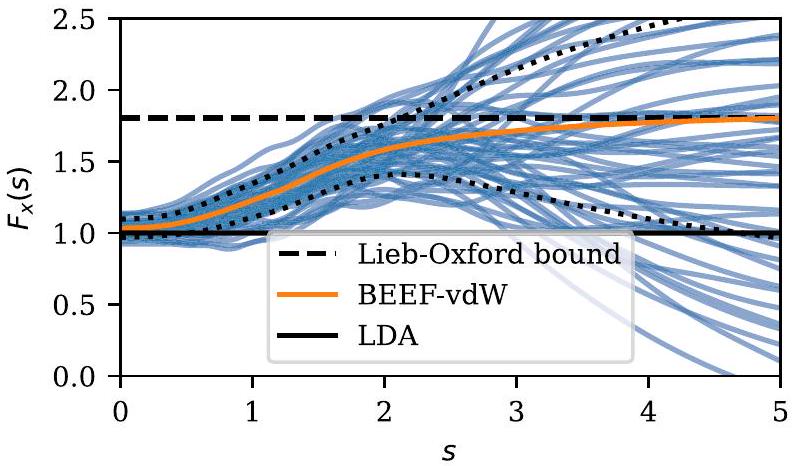
نستعرض حزمة GPAW مفتوحة المصدر بلغة بايثون لحسابات البنية الإلكترونية. تعتمد GPAW على طريقة الموجة المعززة بالمشاريع ويمكنها حل معادلات نظرية الكثافة الذاتية (DFT) باستخدام ثلاثة تمثيلات مختلفة للدالة الموجية، وهي الشبكات في الفضاء الحقيقي، والموجات المستوية، والأوربيتال الذري العددي. التمثيلات الثلاثة تكمل بعضها البعض ومستقلة عن بعضها ويمكن ربطها بواسطة تحويلات عبر الشبكة في…
-
روبوت ناعم متعدد الطبقات مغناطيسي للالتصاق المستهدف عند الطلب A magnetic multi-layer soft robot for on-demand targeted adhesion
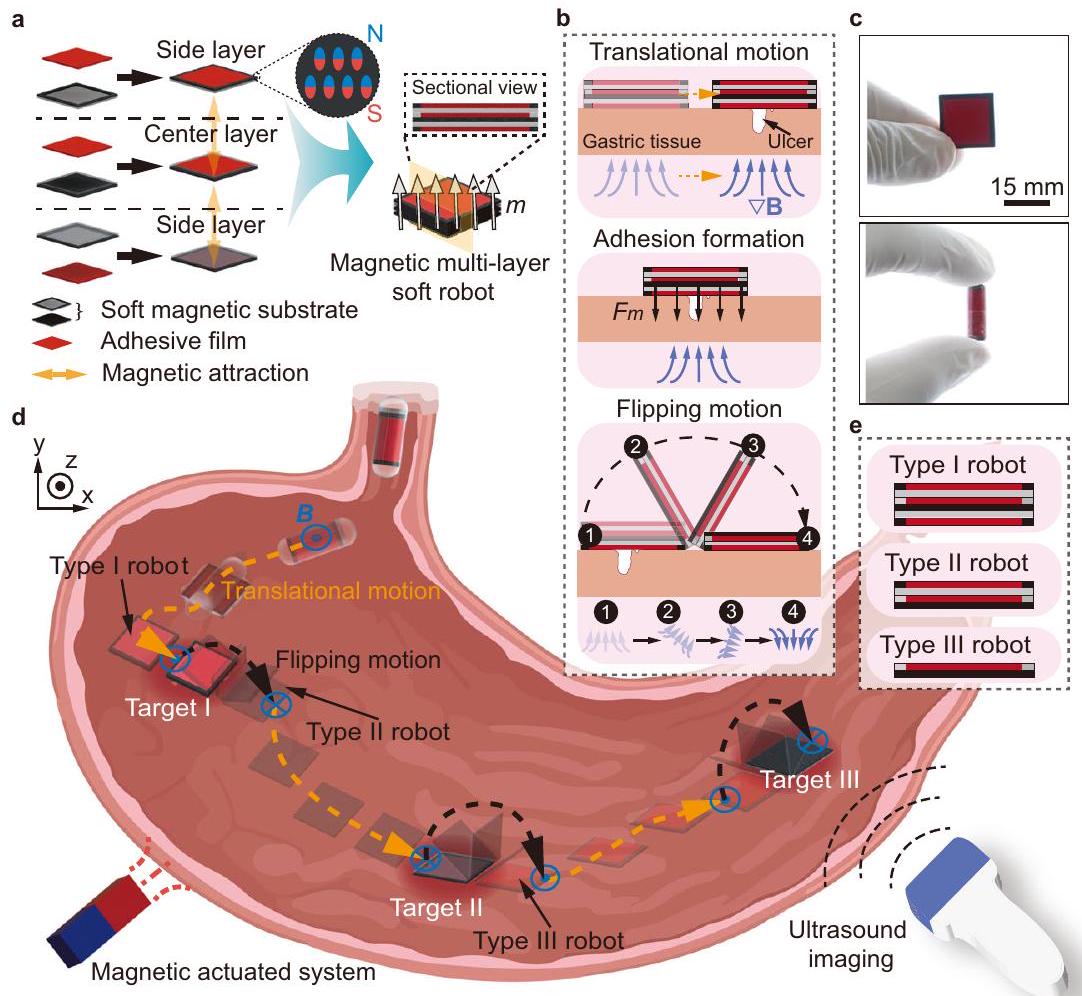
أظهرت الروبوتات اللينة المغناطيسية إمكانيات كبيرة للتطبيقات الطبية الحيوية بفضل قدرتها العالية على إعادة تشكيل الشكل، ومرونة الحركة، وتعدد الوظائف في البيئات الفسيولوجية. يمكن أن تعزز الروبوتات اللينة المغناطيسية ذات الهياكل متعددة الطبقات سعة التحميل وتعقيد الوظائف للتوصيل المستهدف. ومع ذلك، لم يتم التحقيق بشكل كامل في التفاعلات بين الكيانات اللينة، وبالتالي فإن تجميع الروبوتات…